 DCモーター制御(その1)
DCモーター制御(その1)「しんかい2000cm」は予定では推進用モータ2個、潜水用モータ1個を使用して有線で遠隔操作したいので早めに為しておきたい。
■今回、秋月電子で購入したもの
「Arduino Uno Rev3」 (2940円)
 |
ブレッドボード2枚(460円)
 |
しかし、動かしてみるとキッチリとつながっているようだ。
東芝製のモータドライバーTB6643KQ(280円)
 |
あとは小物を少し購入。
潜水装置の予算は材料費1万円程度としていたが怪しくなってきた。
マイコンのArduino1個で3回路制御できるのか試してみたいのでDCモータ2個を制御できると書いてあるAEーDRV8835-S(300円)を後先を考えずに購入しておいた。
Webで秋月電子で購入したと多く書かれている「TA8428K(s)」がちょうど良さそうだが、秋月電子になぜか無い。
余り調べずに代わりに売っていた「TB6643KQ」を購入した。
購入後に仕様を見ると次の通りで使えそうで安心した。その後、実際に動かしてみると作動したのであと2個購入を考えている。
| 6643の入力電圧 | Uno出力電圧 (PWM出力ポート) |
| IN1,2(high判定) 2V~5.5V IN1、2(low判定) 0V~0.8V |
(high) 5V (low) 0V |
| 6643のPWM周波数 | UnoのPWM出力周波数 |
| ~100KHz | 490Hz or 980Hz |
ただTB6643KQの電源電圧として10V~45Vを供給しなければいけないので、最低10Vを確保する必要がある。前回、購入した乾電池8本のホルダーを使っているので問題は無い。
YouTube動画

Arduino unoからブレッドボードに載せたモータドライバIC「TB6643KQ」を動かしている。
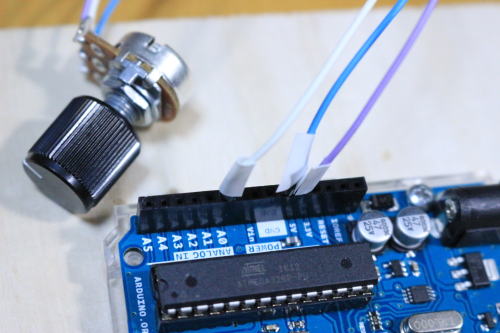
配線はシンプルだ。
「Arduino uno」から「TB6643KQ」への配線はGND、とICの1番足(IN1)、2番足(IN2)への計3本だけ。
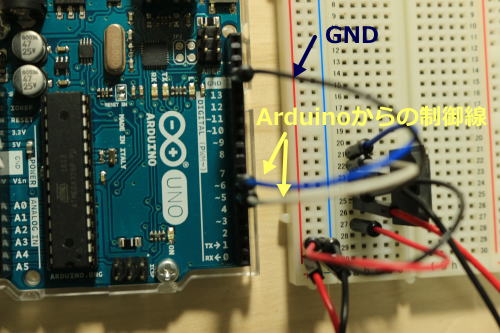
回転制御用のボリュームを「Arduino uno」のIN側に接続、5V端子とGNDにVRの両端をつなぎ真ん中のスライダーをアナログ入力端子につないでいる。基盤の色が青いのはカメラのホワイトバランスの設定ミス、基盤が寒くて青くなっているのでは無い。
動かしてみると負荷をかけた時は手で触れないほど熱くなっており、続けて作動させていると反応しなくなる。

放熱が必要だが放熱用のファンなどないので説明書に放熱板へつなげ、と説明されているIC裏側の金属面に鉄の金物を事務用のクリップで挟んでみた。
少しは冷却されるかもしれない。
Web上では放熱板との間に塗る専用のグリスも有ると書いてある。(取り付けてみるとそれなりの効果はあった。)
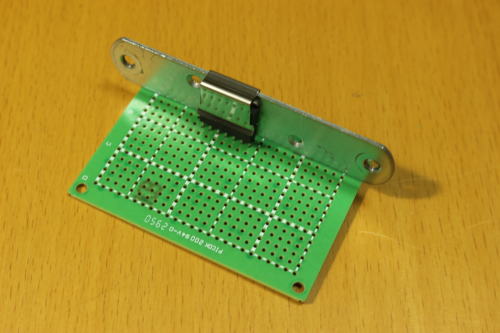
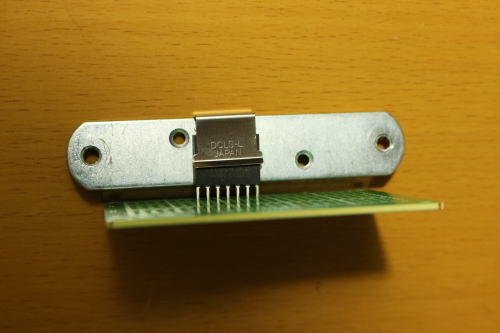
基盤にはんだ付けしたICにクリップで挟んだ鉄板を横から見たところ。
★ ★ ★ まとめ ★ ★ ★
今回、ArduinoとモータドライバーICでモータを制御して分った事は、負荷をかけずにフリーでモータを動かすと快適に制御できるが、マグネットカップリングのガタガタの装置を使用すると、かなりの負荷がかるらしく、ピーという音して、音がだんだん大きくなり、ボリュームおもいきり回さないとモータは動かない。
その時ICは手で触れないほど熱くなっており、そのうち反応しなくなる。熱で暴走しているみたいだ。
配線もぐらぐらしているのでICを基盤に固定して放熱板もどきを付けてみた。これで何とか動くようになった。
メジャーなものを使用したり購入しておくと使用方法やトラブル解決の方法を皆さん詳しくネット上にあげてくれているので助かる。
「しんかい2000cm」トップページへ  |
次回 ▶ ▶ ▶ DCモーター制御(その2)  |
|
| モータードライバーIC TB6643KQ  |
モータードライバーIC AE-DRV8835-s  |
|
おっさんhobby(PC版)HOMEへ |
おっさんhobby(スマホ版)HOMEへ |