モータードライバー
可変抵抗による速度制御
(正回転・停止・逆回転)
今回使用したモータードライバーIC「TB6643KQ」
 |
| 端子番号 | 内容 | 接続先 |
| 1 | IN1(制御信号入力1) | ArduinoUNO5番ピン |
| 2 | IN2(制御信号入力2) | ArduinoUNO6番ピン |
| 3 | OUT1 | モーターへ |
| 4 | GND | GND、外部電源ー |
| 5 | OUT2 | モーターへ |
| 6 | N.C | 接続無し |
| 7 | 電源電圧印加端子 | 外部電源+ |
動作表
| IN1 | IN2 | 動 作 |
| H | H | ショートブレーキ |
| L | H | 正転(逆転) |
| H | L | 逆転(正転) |
| L | L | ストップ |
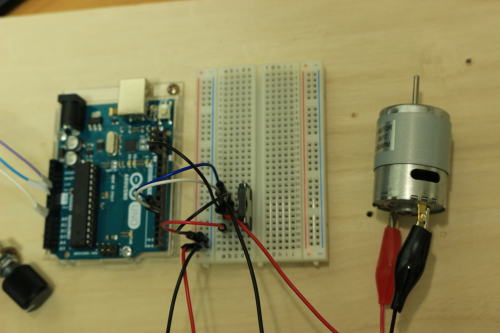
配線
コントロール用のVR(10kΩ)は両端の端子をArduinoのGNDと5Vピン、可動子部分(中間の端子)をA0ピンへ接続
スケッチ
(一応これで動きました、参考にしてください。)
void setup(){
}
void loop(){
int val=analogRead(0)/2;//入力の0~1023を0~511に変換
if(val>=250 && val<=260){
//静止
analogWrite(5,0);
analogWrite(6,0);
}else if(val>260){
//正転(逆転)
analogWrite(5,0);
analogWrite(6,val-256);//6番ピンに5~255を出力
}else{
//逆転(正転)
analogWrite(5,255-val); //5番ピンに6~255を出力
analogWrite(6,0);
}
delay(10)
}
10kΩの可変抵抗はつまみを回し丁度真ん中が5kΩではなく中心からずれています。
停止したとかろから右に回すとだんだん回転が速くなり、停止したところから左に回すと逆回転し回すに従い、だんだん回転が速くなります。
 |
動作させた動画です。
モーター制御(その2)へ

モーター制御(その3)へ

モーター制御(その4)へ
スクリューの作成へ