モータードライバー
DRV8835
2モーターで速度制御 & 左右旋回・後進
今回使用したモータードライバーICは「DRV8835」使用のDCモータードライバーモジュールです。
秋月電子にて購入したものは
モジュールとピンが入っていて自分ではんだ付けするものです。
 |
ピンをはんだ付けした写真
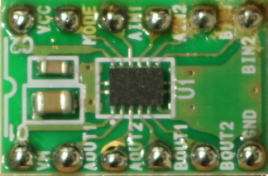 |
| 端子番号 | 内容 | 接続先 |
| 1 | Motor supply | Bypass to GND with a 0.1-μF (minimum) ceramic capacitor |
| 2 | Bridge A output 1 | Connect to motor winding A |
| 3 | Bridge A output 2 | Connect to motor winding A |
| 4 | Bridge B output 1 | Connect to motor winding B |
| 5 | Bridge B output 2 | Connect to motor winding B |
| 6 | GND, Thermal pad |
Device ground |
| 7 | BIN2/BENBL | Bridge B input 2/ENABLE input |
| 8 | BIN1/BPHASE | Bridge B input 1/PHASE input IN |
| 9 | AIN2/AENBL | Bridge A input 2/ENABLE input |
| 10 | AIN1/APHASE | Bridge A input 1/PHASE input |
| 11 | MODE | Input mode select |
| 12 | Device supply | Device supply |
11番のMODEはIN/INモードで使用するのでGNDに接続しています。
モジュール自身の電源が必要なため12番にArduinoから5Vをもらっています。
動作表(IN/INモード)
| IN1 | IN2 | 動 作 |
| H | H | ショートブレーキ |
| H | L | 正転(逆転) |
| L | H | 逆転(正転) |
| L | L | ストップ |
左右にモーターを付けた船?を想定しているので、速度調整は2つのモーターのスピードを1つのVRで制御し
右旋回(左側のモーターのみ作動)、左旋回(右側のモーターのみ作動)、後進は2つのタクトスイッチで操作するつもりで作ってみました。。
想定している動き
速度制御:可変抵抗
| SW1 | SW2 | |
| 直進 | OFF | OFF |
| 右旋回 | ON | OFF |
| 左旋回 | OFF | ON |
| 後進 | ON | ON |
SWを2つとも押さなければ前進、SW1を押している間は右回転し、SW2を押している間は左回転、2個を同時に押せば後進、速度は可変抵抗器を回して制御しようと考えています。
「しんかい2000cm」は一応有線制御を考えています。
 |
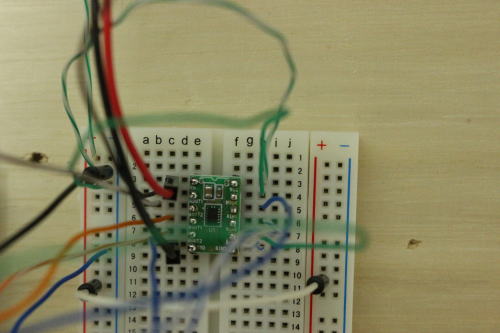 |
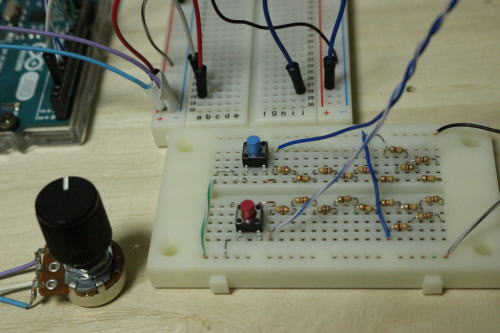
時間が無いので見栄えは非常にに悪いです。
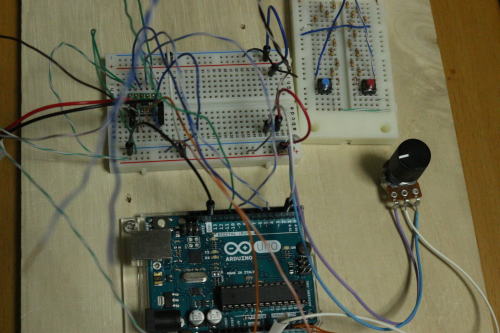
まだ、動作はさせていません。
動かす前にもう一度配線を見直さないと多分、間違ったところがある気がする。
いつも真夜中に作業しているので、ブイーン、ブイーンとモーターを回転させるわけにもいかないので昼間に時間が取れた時に動画をとるつもりです。
続きはこちらで

その次はこちら
「モーター制御」のはじめのページはこちら

マグネットカップリング(その2)
